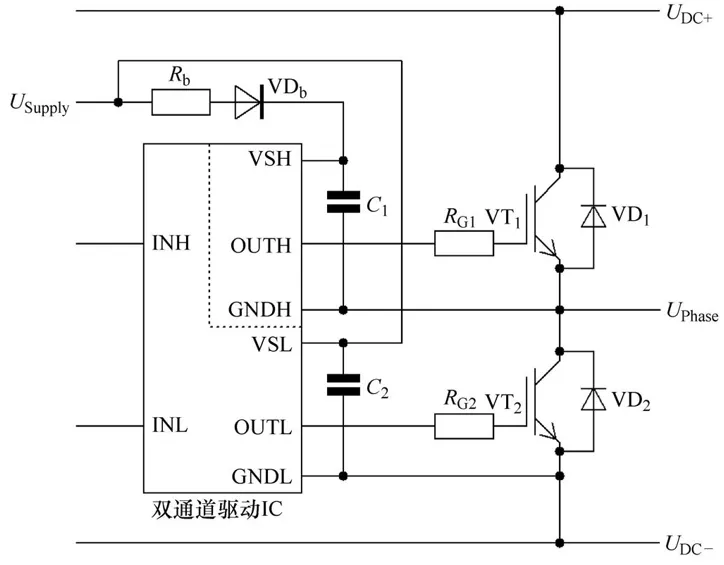
▪️系统启动时,要保证先开通半桥的下桥臂IGBT,这样自举电容能够被充电到上桥臂所需的驱动电压的额定值。否则可能会导致不受控制的开关状态和/或错误产生。
▪️自举电容器C1的容量必须足够大,这样可以在一个完整的工作循环内满足上部驱动器的能量要求。
自举电容器的电压不能低于最小值,否则就会出现低压闭锁保护。
▪️最初给自举电容器充电时,可能出现很大的峰值电流。这可能会干扰其他电路。因此建议用个小电阻Rb来限制电流。
▪️一方面,自举二极管必须快,因为它工作的频率和IGBT是一样的,一般用超快恢复二极管,如果功率器件是SiCMOS话这个二极管可能需要SiC二极管;另一方面,它必须有足够大的耐压,至少和IGBT的阻断电压一样大。这就意味着,600V/1200V的IGBT,就必须选择600V/1200V的自举二极管。在选择二极管的时候,考虑到其额定电压和开关频率,二极管的封装必须保证足够大的电气间隙和爬电距离。
▪️当选择驱动电源电压时,要考虑自举电路的损耗,必须考虑驱动器内部电压降以及自举二极管VDb和电阻Rb的压降,还必须减去下桥臂IGBT VT2的饱和电压。最终的自举电压要保证上管IGBT栅极电压不能太低而导致开通损耗增加(因为电压UCEsat增加)。
▪️上下驱动器的供电电压都是USupply。然而,上桥臂驱动器的供电电压需要减去上文提到的电压,这样导致上桥臂的IGBT VT1驱动电压总是要比下桥臂VT2要低,是在不同的正向栅极电压下开通的。因此,电压USupply选取应当保证VT1有足够的栅极电压,并且同时VT2的栅极电压也不会变得太高。
▪️对于自举电容器,应该选用低等效串联电阻ESR和等效串联电感ESL的电容器(比如陶瓷电容),这样可以有效为驱动提供脉冲电流。根据需要和应用环境,也可以选用高容量的电容(比如电解电容)与这些电容并联使用。相比陶瓷电容,电解电容具有更高的ESR和ESL值,所以建议并联陶瓷电容。通常,这一设计原则也适用于下桥臂驱动器的缓冲电容C2。
▪️用自举电路来提供负电压的做法是不常见的,如此一来,就必须注意IGBT的寄生导通了(密勒钳位可以防止寄生导通,参考《驱动电路设计(三)---驱动器的功能---电源》。
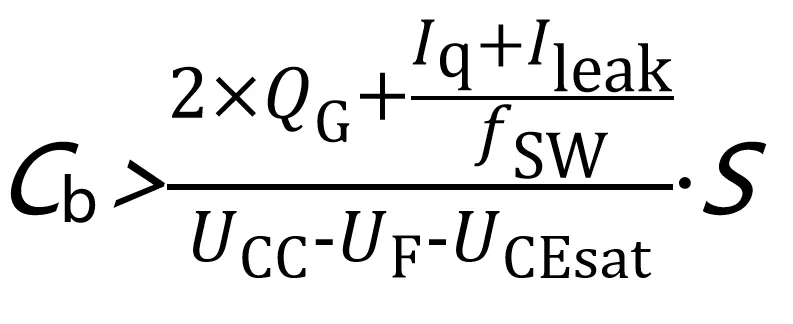
最后需要注意的是,IGBT开关产生的dv/dt通过自举二极管VDb的结电容会产生共模电流,因此选择合适的高压二极管是至关重要的。英飞凌的一些电平位移驱动电路芯片将高压自举二极管集成在芯片里,设计应当注意最大dv/dt不能超出最大承受能力。另外,二极管VDb与其串联电阻Rb共同决定充电电流,当开关频率为fSW时,可以计算最大Cb。